绕线机的排线过程关系着整个绕制效果,只有合理的设计排线机构,才能使得绕线机的绕制效果更完美,我们以龙鑫电子的这款自动绕线机为例,介绍一下绕线机基于ADAMS的排线机构的设计原理。

1)排线机构的运动
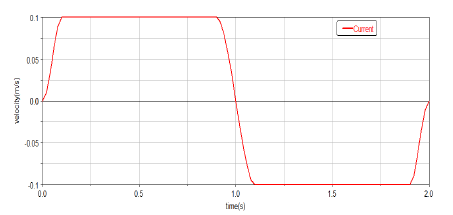
绕线机工作时,主轴转速迅速上升至设定速度,同时排线机构亦开始做往复排线运动。节能灯骨架线圈槽宽9. 8mm,漆包线线径为0. 16mm,设定的主轴转速为4000rpm。根据以上参数并结合骨架线圈的特点与绕制工艺,充分考虑实际生产效率,可得排线机构X, Y轴的运动规律如下图所示。

排线机构的排线运动的控制采用S形曲线控制算法。S型曲线加减速控制算法是指在加减速过程中,使加速度的导数(加加速度J)为常数,通过对J值的控制,使加速度曲线连续变化,从而避免了柔性冲击,速度的平滑性很好,能满足高速和高精度的要求。根据排线机构的运动规律,拟合出如下图速度曲线。
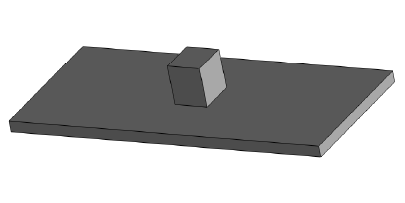
排线机构在排线运动时,底板与箱体间产生的接触力,即在上部排线机构高速往复运动的作用下,下底板与箱体间的接触面相互作用,因此将三维机构与其附属机构简化为一立方体模型,立方体模型重为50kg。下底板按绕线机的原有几何尺寸进行建模。这样就可以将模型导入ADAMS中,并按照特定运动规律进行接触力的计算。下底板的材料设置为45钢。
3) ADAMS中的约束
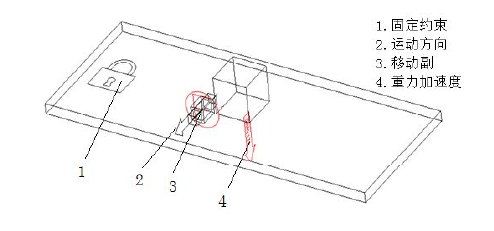
将底板的下底面做固定约束,即约束下底面的6个自由度以模拟底板固定在箱体之上的构造。上立方体(排线机构)与底板建立移动副,并设置此移动副的摩擦系数,设置系统默认的静摩擦系数0. 5,动摩擦系数0. 3。
设置移动副的运动,按前述的S型曲线算法的速度运动规律输入上立方体的运动规律。并在重力方向加入重力加速度。下图为ADAMS中简化模型的约束状态。
4)接触力的计算结果
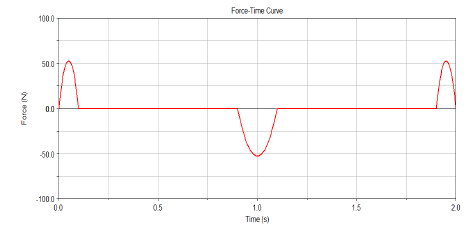
经过ADAMS计算之后,得出在固定约束中的约束反力时间历程曲线,如下图所示。值得注意的是,此约束反力将作为下一步瞬态分析(时间历程分析)中的激励输入到主轴系统中,以得到主轴系统的响应。
 精密平行绕线机
精密平行绕线机 精密环型绕线机
精密环型绕线机 自动飞叉绕线机
自动飞叉绕线机 全自动设备系列
全自动设备系列 精密线圈
精密线圈 包胶线圈
包胶线圈 精密马达线圈
精密马达线圈 空芯线圈
空芯线圈 变压器线圈
变压器线圈